
Hello there! I’m Liding Zhang (张立鼎), and currently at the Chair of Robotics, Artificial Intelligence and Real-Time Systems (AIR) at the Technical University of Munich (TUM), under the supervision of Prof. Alois Knoll, specializing in robotics and artificial intelligence. My research centers on sampling-based almost-surely asymptotically optimal (a.s.a.o) motion planning, high-DOF multi-robot manipulation and collaboration, coordinated control of mobile robot fleets, and related areas in advanced robotics. I have published 25+ papers in leading robotic journals such as IEEE T-Mech, IEEE T-ASE, IEEE RA-L, and have presented at robotic flagship conferences including ICRA and IROS.
Beyond academia, I gained industry experience as an NVH Assistant Engineer at Volkswagen Automatic Transmission (Tianjin) Co. Ltd. and contributed to EU-wide, DE-national, and state-funded projects in Germany, such as BMBF’s 6G-life, the DARKO Project, and the Bavarian KI.FABRIK initiative. Outside of research, I enjoy music 🎺🎸🎹 and was awarded First Prize in the National Trumpet Competition in China.
🔥 News
- 2025.07: 🥰🥰 Multi-Informed Trees (MIT*) accepted by IEEE T-ASE, come and check our latest research. [Video]
- 2025.06: Two first author papers accepted by IROS 2025. See you in Hangzhou!
- 2025.03: 🎉🎉 Check out our robotic survey, “Motion planning for robotics: A review for sampling-based planners”, is rewarded by Certificate of Editors’ Choice at Biomimetic Intelligence and Robotics (BIRob) [JCR Q1, IF: 5.5].
🌏 Selected Projects
Small demo section in AI.BAY conference opening at the Deutsches Museum in Munich
Collaborating with Prof. Sami Haddadin to present Collective Learning at ICRA talk
Robot manipulator assembling a gearbox transmission using multiple tools
Collaborating with Prof. Birgit Vogel-Heuser on ontology-based intrologistic assembly planning
Fleet management through multi-robot collaboration with AGVs and DARKO robot
Tactile-based cable routing and force error handling with Kejia Chen and Prof. Alois Knoll
📝 Selected Publications
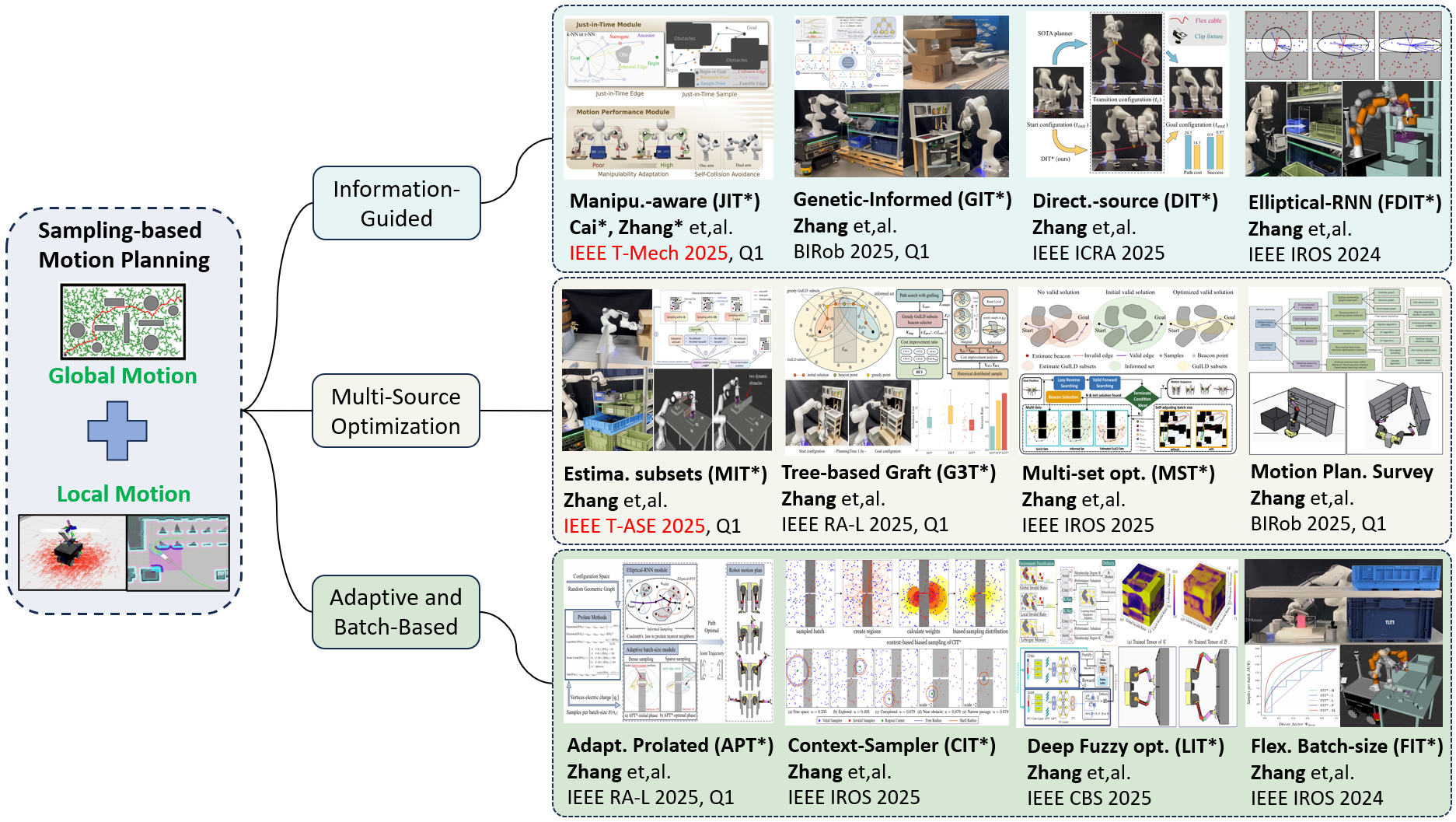
Multi-Source Subset Optimization
-
Estimated Informed Anytime Search for Sampling-Based Planning via Adaptive Sampler
Liding Zhang, Kuanqi Cai, Yu Zhang, Zhenshan Bing, Chaoqun Wang, Fan Wu, Sami Haddadin, Alois Knoll
IEEE T-ASE 2025 [arXiv] [video] [doi] -
Tree-Based Grafting Approach for Bidirectional Motion Planning with Local Subsets Optimization
Liding Zhang, Yao Ling, Zhenshan Bing, Fan Wu, Sami Haddadin, Alois Knoll
IEEE RA-L 2025 (also presented at IROS 2025) [arXiv] [video] [doi] -
Multi-Sets Trees (MST*): Accelerated Asymptotically Optimal Motion Planning Optimization Informed by Multiple Domain Subsets
Liding Zhang, Sicheng Wang, Kuanqi Cai, Zhenshan Bing, Alois Knoll
IROS 2025 Accepted [video] -
Motion Planning for Robotics: A Review for Sampling-based Planners
Liding Zhang, Kuanqi Cai, Zewei Sun, Zhenshan Bing, Chaoqun Wang, Luis Figueredo, Sami Haddadin, Alois Knoll
BIRoB 2025 [arXiv] [doi]
Information-Guided Motion Planning
-
Just-in-Time Informed Trees: Manipulability-Aware Asymptotically Optimized Motion Planning
Kuanqi Cai*, Liding Zhang*, Xinwen Su, Kejia Chen, Chaoqun Wang, Sami Haddadin, Alois Knoll, Arash Ajoudani, Luis Figueredo
IEEE/ASME T-Mech 2025 [video] [doi] -
Genetic Informed Trees (GIT*): Path Planning via Reinforced Genetic Programming Heuristics
Liding Zhang, Kuanqi Cai, Zhenshan Bing, Chaoqun Wang, Alois Knoll
BIRoB 2025 [arXiv] [video] [doi] -
Direction Informed Trees (DIT*): Optimal Path Planning via Direction Filter and Direction Cost Heuristic
Liding Zhang, Kejia Chen, Kuanqi Cai, Yu Zhang, Yixuan Dang, Yansong Wu, Zhenshan Bing, Fan Wu, Sami Haddadin, Alois Knoll
ICRA 2025 [arXiv] [video] [doi] -
Elliptical K-Nearest Neighbors – Path Optimization via Coulomb’s Law and Invalid Vertices in C-space Obstacles
Liding Zhang, Zhenshan Bing, Yu Zhang, Kuanqi Cai, Lingyun Chen, Fan Wu, Sami Haddadin, Alois Knoll
IROS 2024 [arXiv] [video] [doi]
Adaptive and Batch-based Sampling
-
APT*: Asymptotically Optimal Motion Planning via Adaptively Prolated Elliptical R-Nearest Neighbors
Liding Zhang, Sicheng Wang, Kuanqi Cai, Zhenshan Bing, Fan Wu, Chaoqun Wang, Sami Haddadin, Alois Knoll
IEEE RA-L 2025 [arXiv] [video] [doi] -
CIT*: Context-Based Biased Batch-Sampling for Almost-Surely Asymptotically Optimal Motion Planning
Liding Zhang, Yankun Wei, Kuanqi Cai, Zhenshan Bing, Yuan Meng, Fan Wu, Sami Haddadin, Alois Knoll
IROS 2025 Accepted [video] -
Deep Fuzzy Optimization for Batch-Size and Nearest Neighbors in Optimal Robot Motion Planning
Liding Zhang, Qiyang Zong, Yu Zhang, Zhenshan Bing, Alois Knoll
IEEE CBS 2025 Accepted [arXiv] [video] -
Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach in Informed Sampling-Based Path Planning
Liding Zhang, Zhenshan Bing, Kejia Chen, Lingyun Chen, Kuanqi Cai, Yu Zhang, Fan Wu, Peter Krumbholz, Zhilin Yuan, Sami Haddadin, Alois Knoll
IROS 2024 [arXiv] [video] [doi]
💬 Community Services
Chair:
- 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Teaser Session of Robot Motion Planning IV, ADNEC in Abu Dhabi, UAE.
- 2025 IEEE International Conference on Cyborg and Bionic Systems (CBS), Teaser Session of Motion Planning and Control T2, Empark Grand in Beijing, China.
Reviewer:
- IEEE Transactions on Robotics (T-RO),
- IEEE Transactions on Automation Science and Engineering (T-ASE),
- IEEE/ASME Transactions on Mechatronics (T-Mech),
- IEEE Robotics and Automation Letters (RA-L),
- IEEE Transactions on Neural Networks and Learning Systems (TNNLS),
- IEEE International Conference on Robotics and Automation (ICRA),
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
- IEEE-RAS International Conference on Humanoid Robots (Humanoids),
- IEEE International Conference on Cyborg and Bionic Systems (CBS).